
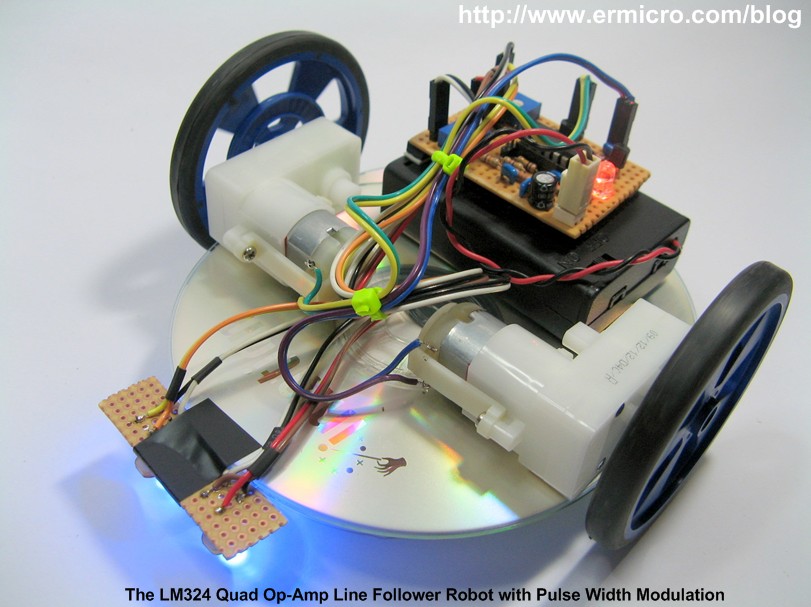
วันก่อนผมเห็นมีงานแข่งหุ่นยนต์ เสียดายมากเลยไม่ได้เข้าร่วมแข่งด้วย รอบนี้ผมเลยเจ็บใจ เลยเอาโปรเจคหุ่นยนต์ตามเส้นอย่างง่ายมาฝากด้วย หุ่นยนต์ในครั้งนี้ดังภาพ จะประกอบไปด้วยมอเตอร์สองตัว แผ่นซีดีเสียอีก 1 แผ่น เซ็นเซอร์แสง 2 ตัว ส่วนมากก้อหาได้ง่าย ก้อทำหุ่นยนต์ได้แล้ว เผื่อรอบหน้าจะมีการแข่ง tune หุ่นอย่างเดียวบ้าง
สำหรับ การทำงานของหุ่นยนต์ตัวนี้ ไม่มีไมโครคอนโทรลเลอร์ครับ ช่วงนี้หาได้ยากแล้วการควบคุม ที่ไม่มีไมโคร ใช้เพียงแค่การเปรียบเทียบแรงดันจากเซ็นเซอร์แสงซ้ายและขวา เพื่อนำไปปรับความเร็วของมอเตอร์เท่านั้น ดูเข้าใจง่ายดี แต่สิ่งที่พิเศษมากกว่าวงจรเปรียบเทียบปกติ ก้อคือ แทนที่จะเป็นแค่รูปแบบ on-off มอเตอร์ แต่เพิ่มสัญญาณสามเหลี่ยมเข้าไปในไอซี comparator ด้วย ดัีงนั้นจึงเป็นการเปรียบเทียบกันแรงดันจากเซ็นเซอร์กับแรงดันจากสัญญาณสามเหลี่ยมครับ จึงทำให้ สัญญาณขาออก เป็น HIGH ถ้าแรงดันจากสัญญาณมากกว่าแรงดันเซ็นเซอร์ และ เป็น LOW ถ้าแรงดันน้อยกว่าเซ็นเซอร์ สัญญาณขาออกออกมาเหมือนเป็นสัญญาณ PWM ดูได้ดังตัวอย่างในรูปข้างล่างครับ ซึ่งก็กลายเป็นว่าถ้าเซ็นเซอร์แสงโดนเส้นเต็มๆ จะทำให้ความแตกต่างของความเร็วมาก แต่ถ้าโดนน้อยๆ ความแตกต่างของความเร็วก้อจะน้อย เหมือนกับเป็นคอนโทรลเลอร์แบบ analog เลยครับ

จากหลักการทำงานมาดูที่วงจรกันบ้าง สิ่งที่เพิ่มมา เป็น วงจรสร้างสัญญาณสามเหลี่ยม ที่ป้อนเข้า ไอซี comparator ครับ

ผมว่าวงจรมันดูง่ายๆ เหมาะกับเอาไปเรียนรู้การสร้างหุ่นยนต์เดินตามเส้นได้ดีครับ ในสนใจเพิ่มเติมอ่านรายละเอียดได้ที่ เวป ermirco ของ Ronald Besinga ได้เลยครับ เขียนได้ละเอียดมาก
โปรแกรมที่ใช้นี้คือโปรแกรมไรครับ
สุดยอดครับ แต่ถ้ามันมีสี่ล้สจะมีปัญหากับการตรวจจะบไหมถ้าเส้าตรวจจับสีดำมันหักมุมมากๆ
ผมว่าไม่มีโปรแกรมนะครับ เป็นการเปรียบเทียบแรงดัน นะครับผมว่า
ใช้ LDR เบอร์ไรครับ
ขอบคุณครับ 😀
หาซื้อรถพวกนี้ได้ที่ไหน และราคาตั้งแต่เท่าไร
รถกระป๋องปกติเลยครับ ให้มี remote มาด้วยก้อพอครับ
ผมลองทำดูแล้วครับ ใช้งานได้ สุดยอดครับ
ผมต้องการแบบนี้ติดต่อซื้อได้ที่ไหน
ตกลงมันมี2ล้อหรือ4ล้อครับ
ผมกำลัง
ทำหุ่นยนต์เดินเส้นช่วยแนะนำหน่อย
ใช่ IR ดีกว่าคับ ใส่แทน LDR เลย
ใช้ค่าใช้จ่ายเท่าไหร่คับ
ผมทำหุ่นยนต์ยุ ไม่มีคัยสอนผมเลย
ช่วยแนะนำหน่อยคับ
ประโยชน์ของมันคืออะไรค่ะ
ของชิ้น นี้มีขายรึป่าวค่ะ ตอนนี้ต้องการเป็นอย่างมาก
ติดต่อเจ้าของ ยังไงค่ะ
ดีมากคับ